Jet Tank
Hiwonder JetTank ROS Robot Tank alimentato da Jetson Nano con touch screen della fotocamera di profondità Lidar, supporto per mappatura e navigazione SLAM
Descrizione prodotto
JetTank è un robot carro armato ROS su misura per l’apprendimento ROS. È caricato con NVIDIA Jetson Nano, motore encoder ad alte prestazioni, Lidar, fotocamera di profondità 3D e schermo LCD da 7 pollici, che aprono più funzionalità. Il controllo del movimento del robot, la mappatura e la navigazione, la pianificazione del percorso, il tracciamento e l’evitamento degli ostacoli, la guida autonoma, il riconoscimento delle caratteristiche umane, l’interazione somatosensoriale e l’interazione vocale possono essere raggiunti!
La diversa combinazione dell’hardware rende JetTank una piattaforma ideale in cui è possibile apprendere e verificare la funzione SLAM robotica, nonché ottenere la soluzione per lo sviluppo di ROS. Vengono forniti enormi materiali di apprendimento e tutorial ROS per aiutarti a iniziare rapidamente!
- Alimentato da NVIDIA Jetson Nano e basato su ROS
- Supporta fotocamera di profondità e Lidar per la mappatura e la navigazione
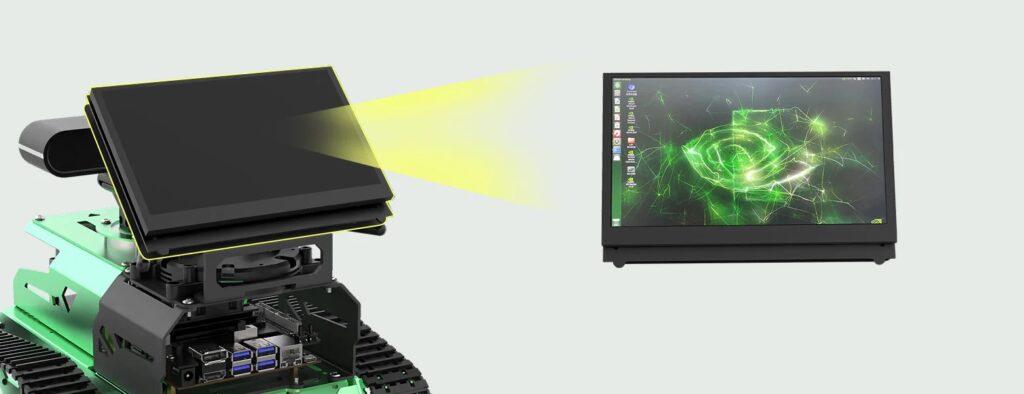
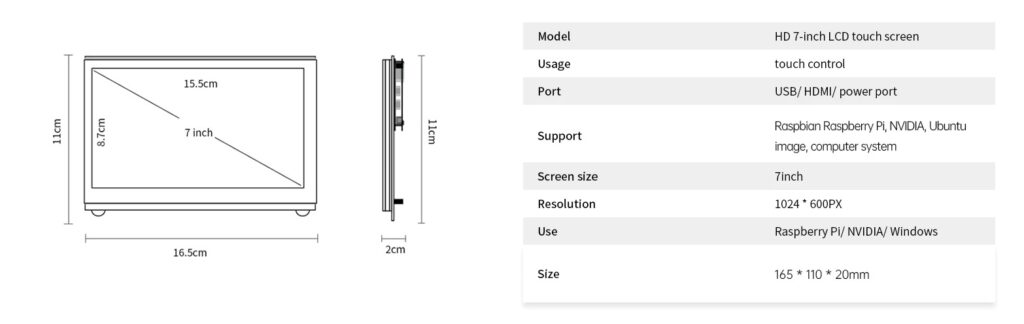
- Touch screen opzionale da 7 pollici per il monitoraggio e il debug dei parametri
- Array di 6 microfoni opzionale per l'interazione vocale
- Sono forniti materiali e tutorial in PDF open-source e ampi
Sistema di controllo Jetson Nano
NVIDIA Jetson Nano è in grado di eseguire framework di deep learning tradizionali, come TensorFlow, PyTorch, Caffe/Caffe2, Keras, MXNet. Fornisci una potente potenza di calcolo per enormi progetti di intelligenza artificiale. Alimentato da Jetson Nano, JetTank può implementare il riconoscimento delle immagini, il rilevamento e il posizionamento degli oggetti, la stima della posa, la segmentazione semantica, l’analisi intelligente e altre funzioni onnipotenti.
Funzione Lidar
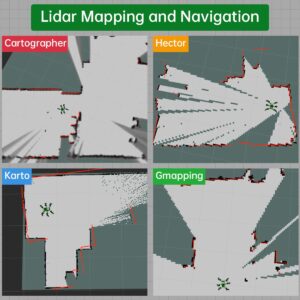
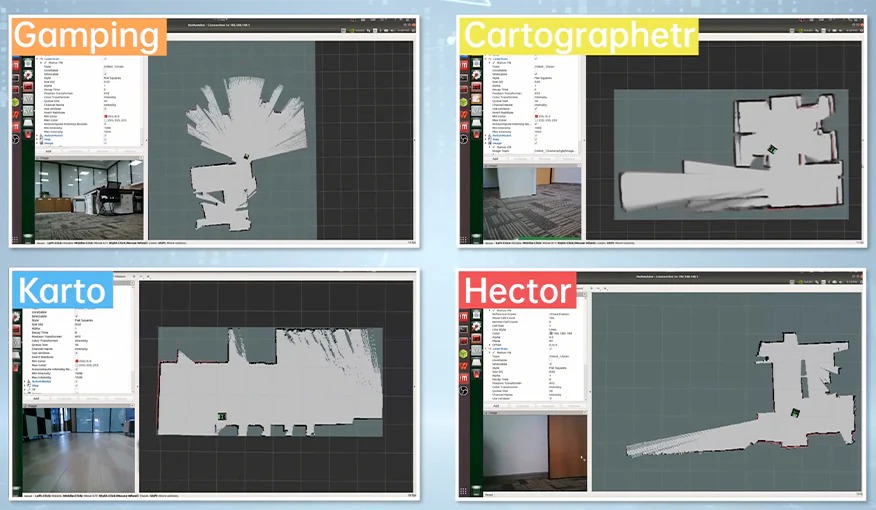
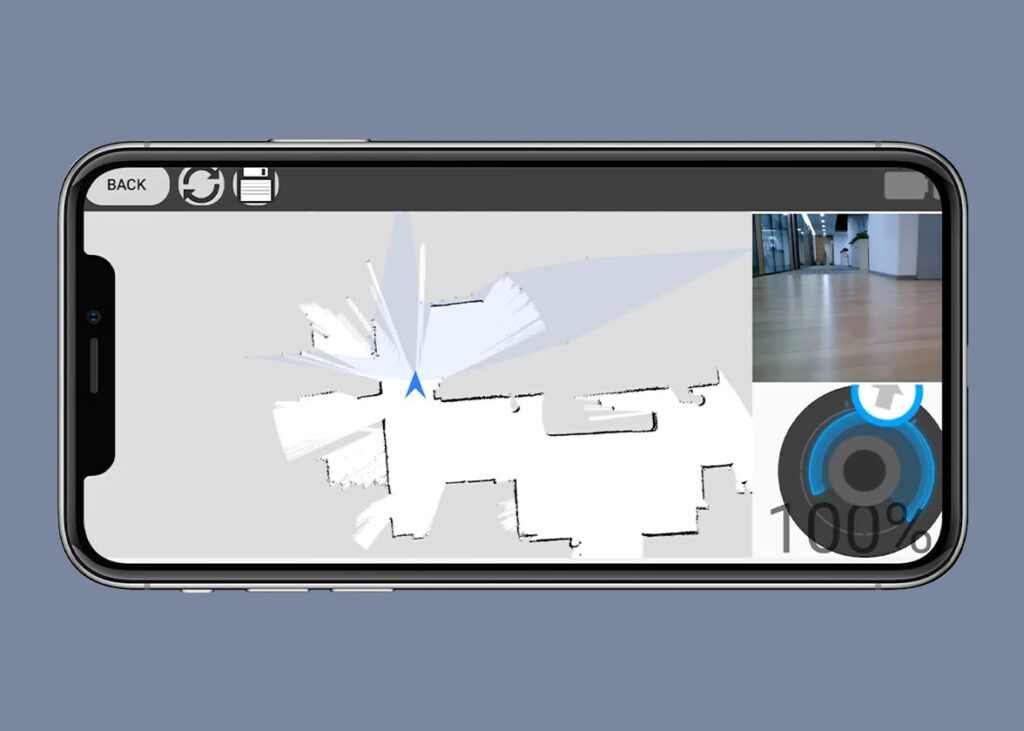
Mappatura e navigazione Lidar 2D
JetTank è caricato con Lidar ad alte prestazioni che supporta la mappatura con diversi algoritmi tra cui Gmapping, Hector, Karto e Cartographer. Inoltre, è possibile implementare la pianificazione del percorso, la navigazione a punti fissi e l’evitamento degli ostacoli durante la navigazione.
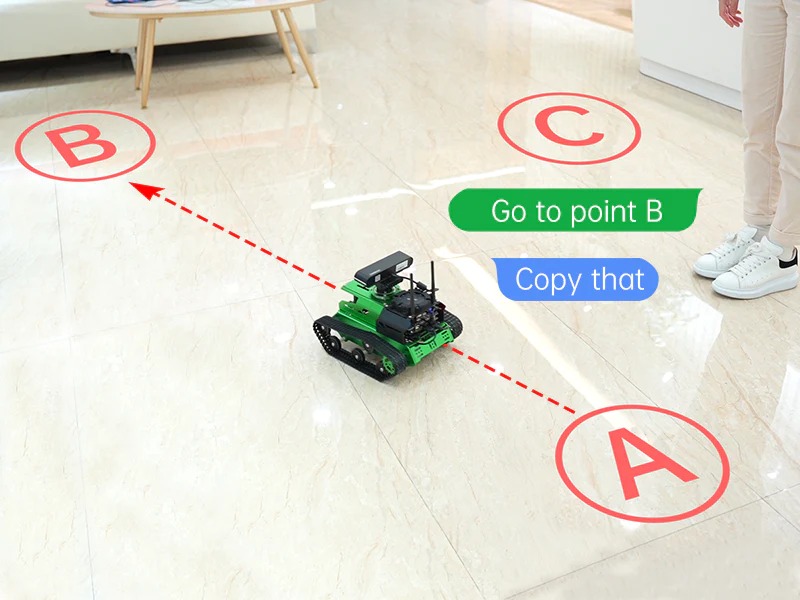
Navigazione a punto singolo, navigazione a più punti
JetTank utilizza Lidar per rilevare l’ambiente circostante in tempo reale per ottenere la navigazione a punto singolo e la navigazione a più punti.
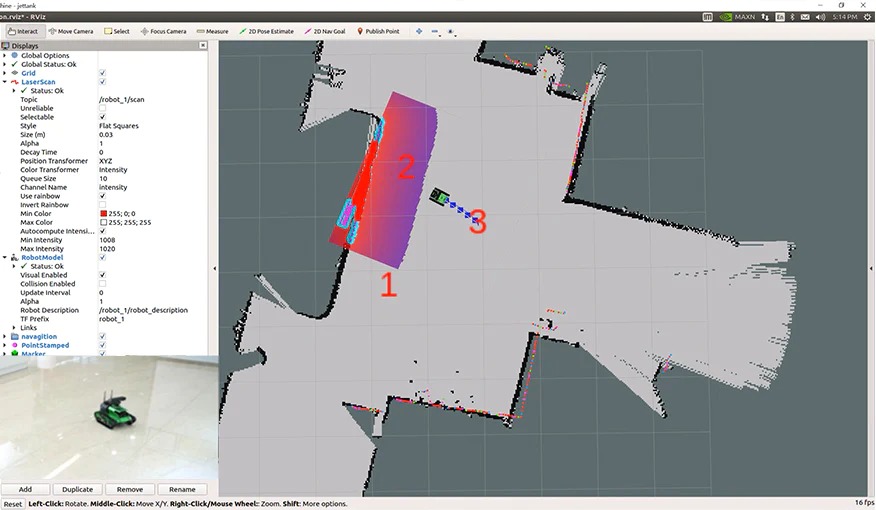
Pianificazione del percorso TEB, prevenzione degli ostacoli
Supporta la pianificazione del percorso TEB, ed è in grado di monitorare l’ostacolo in tempo reale durante la navigazione. Pertanto, può ripianificare il percorso per evitare l’ostacolo e continuare a muoversi.

Mappatura dell'esplorazione autonoma RRT
Adottando l’algoritmo RRT, JetTank può completare la mappatura dell’esplorazione, salvare la mappa e tornare al punto di partenza in modo autonomo, quindi non è necessario il controllo manuale.
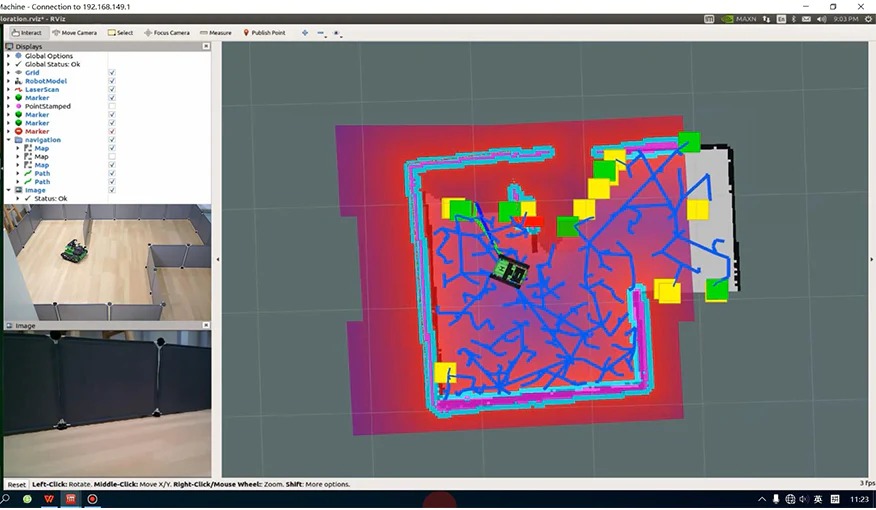


Proteggi l'ambiente circostante e fai suonare l'allarme quando rilevi un intruso.
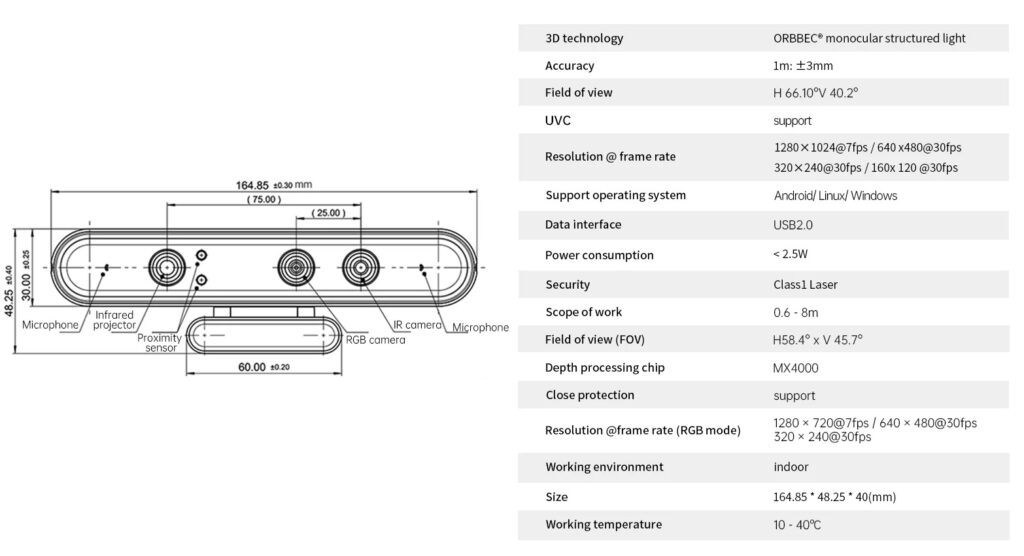
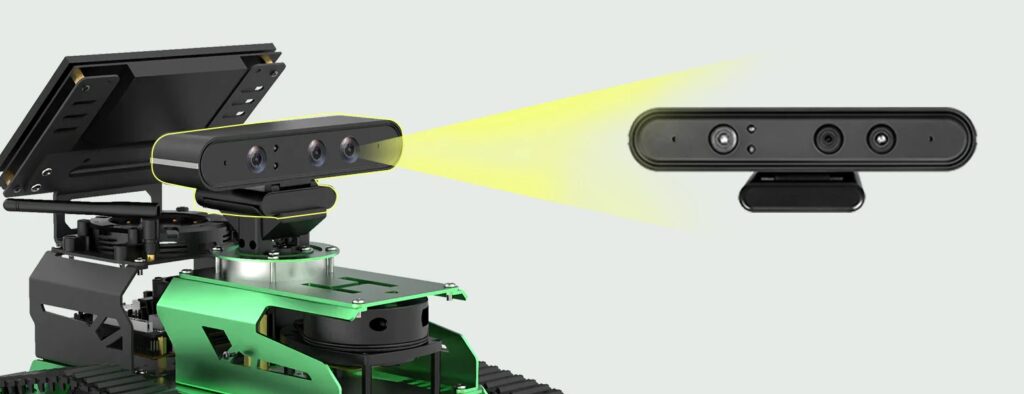
Fotocamera di profondità

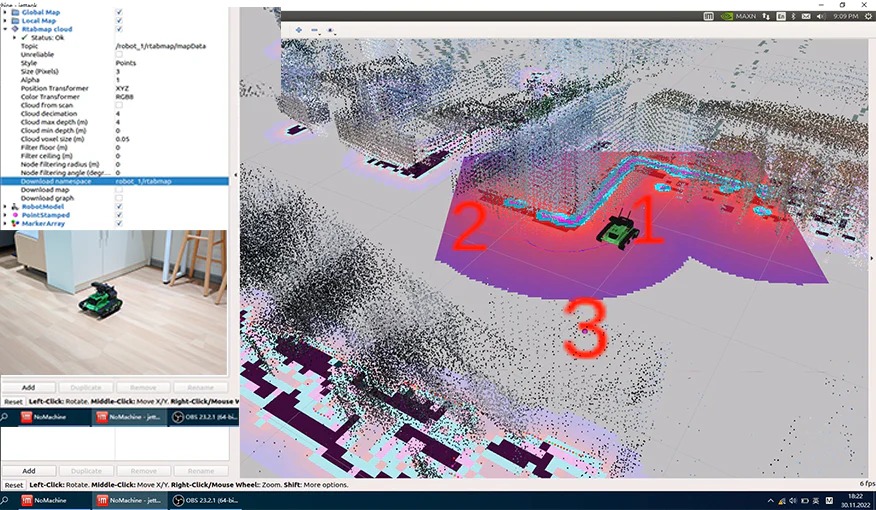
Mappatura e navigazione 3D RTAB-VSLAM
La telecamera di profondità supporta la mappatura 3D in due modi, pura visione RTAB e fusione di visione e Lidar, che consente a JetTank di navigare ed evitare ostacoli nella mappa 3D, nonché di riposizionarsi a livello globale.
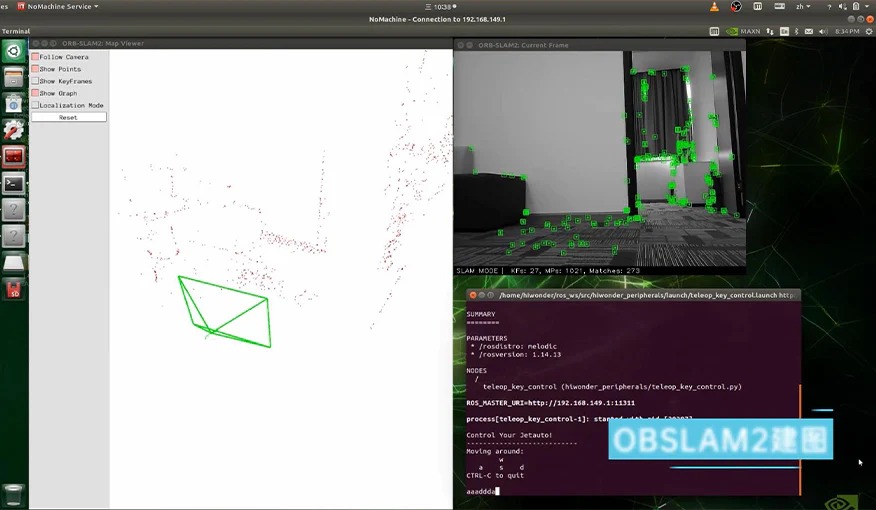
ORBSLAM2 + ORBSLAM3
ORB-SLAM è un framework SLAM open source per fotocamere monoculari, binoculari e RGB-D, in grado di calcolare la traiettoria della fotocamera in tempo reale e ricostruire l’ambiente 3D. E in modalità RGB-D, è possibile acquisire la dimensione reale dell’oggetto.
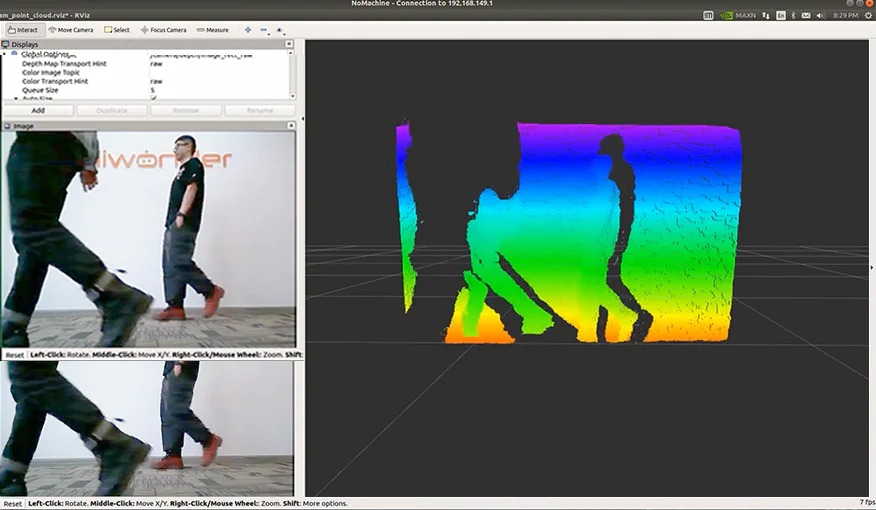
Dati della mappa di profondità, nuvola di punti
Attraverso l’API corrispondente, JetTank può ottenere la mappa di profondità, l’immagine a colori e la nuvola di punti della telecamera.
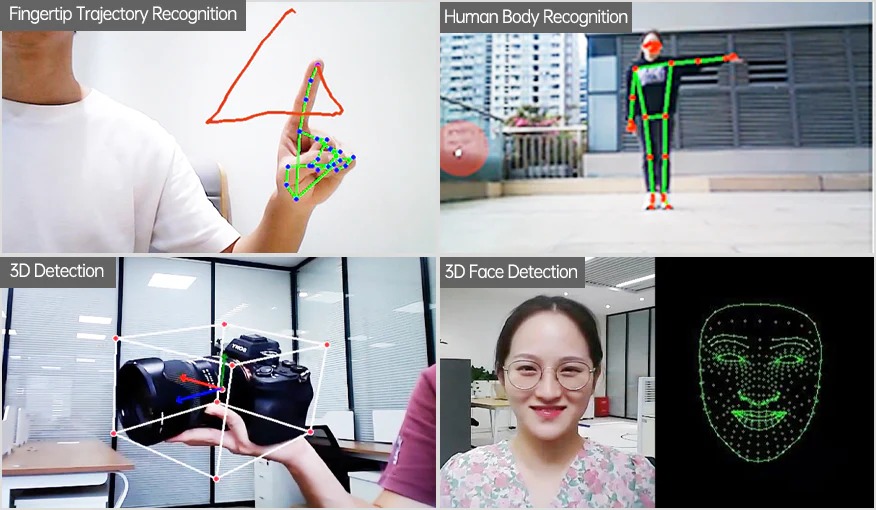
Sviluppo di MediaPipe, interazione AI aggiornata
Basato sul framework MediaPipe, JetTank può eseguire il riconoscimento del corpo umano, il rilevamento della punta delle dita, il rilevamento del volto, il rilevamento 3D e altro ancora.
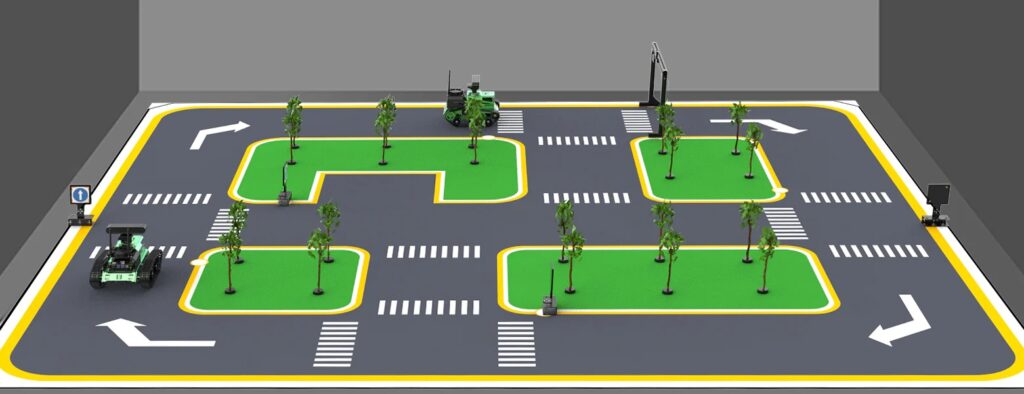
Apprendimento profondo, guida autonoma
Con JetTank, puoi progettare uno scenario di guida autonoma per mettere in pratica il ROS, che ti consente di comprendere meglio le funzioni fondamentali della guida autonoma.
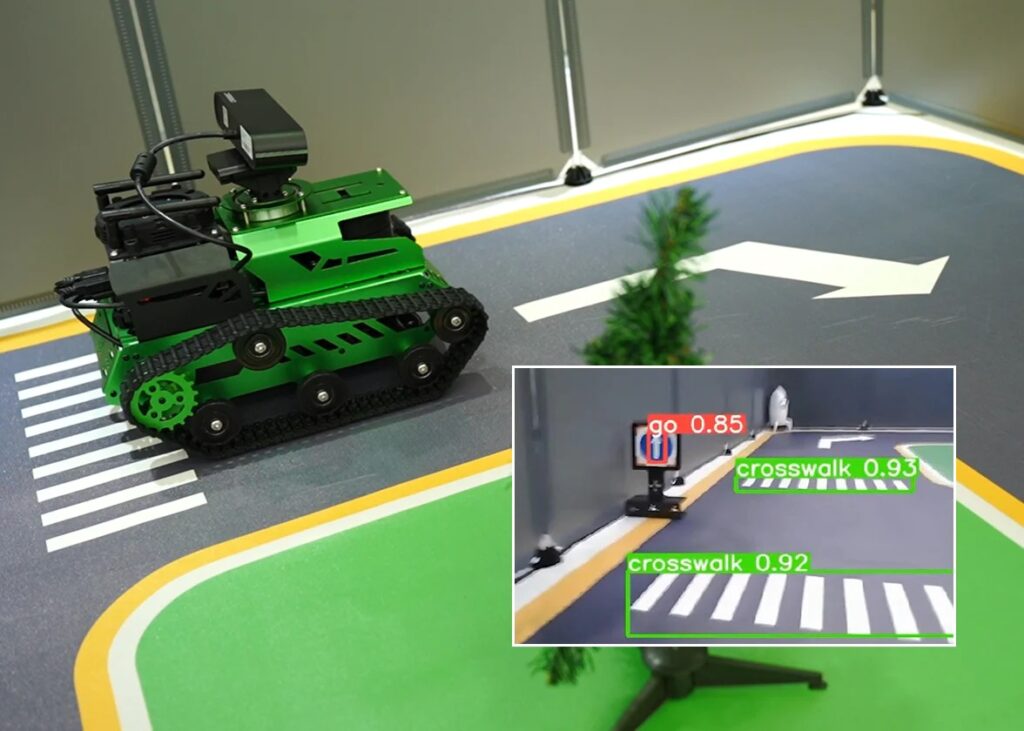
Rilevamento segnaletica stradale
Attraverso l’addestramento della libreria di modelli di deep learning, JetTank può realizzare una guida autonoma con visione AI.
Mantenimento della corsia
JetTank è in grado di riconoscere le corsie su entrambi i lati per mantenere una distanza di sicurezza.

Rilevamento del semaforo
JetTank determina se andare o fermarsi attraverso il riconoscimento del semaforo.

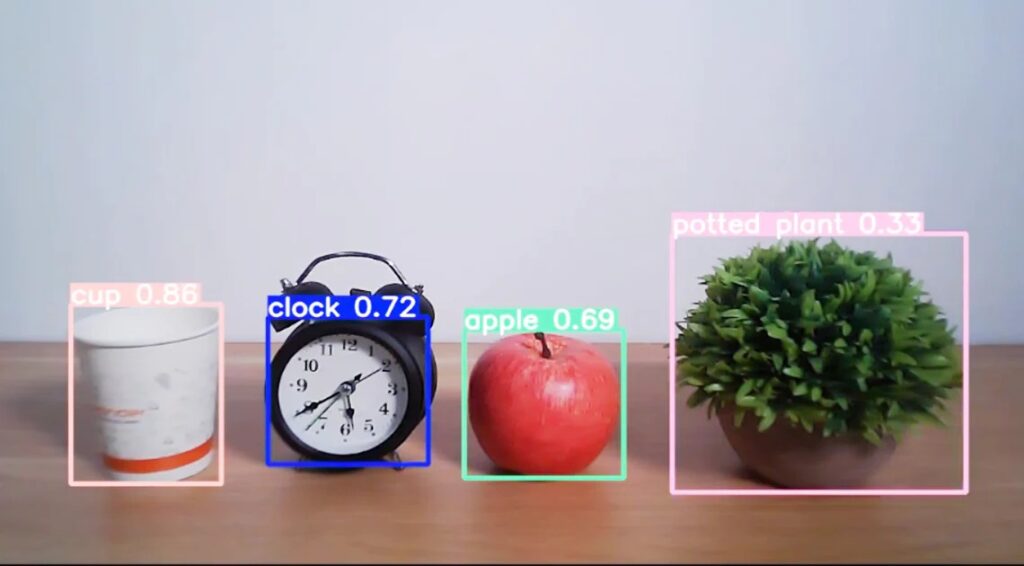
Framework di apprendimento AI
Utilizza l’algoritmo di rete YOLO e la libreria di modelli di deep learning per riconoscere gli oggetti.
Tracciamento target KCF
Basandosi sull’algoritmo di filtraggio KCF, il robot carro armato Jet Tank può tracciare il target selezionato.
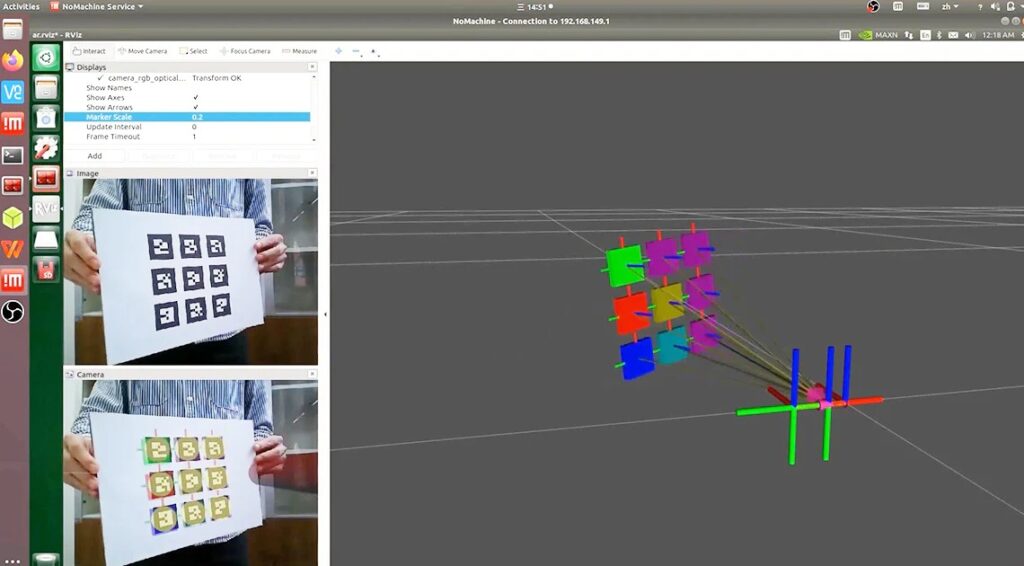
Riconoscimento e tracciamento
JetTank è in grado di riconoscere e tracciare il colore designato e può riconoscere più AprilTag e le loro coordinate contemporaneamente.
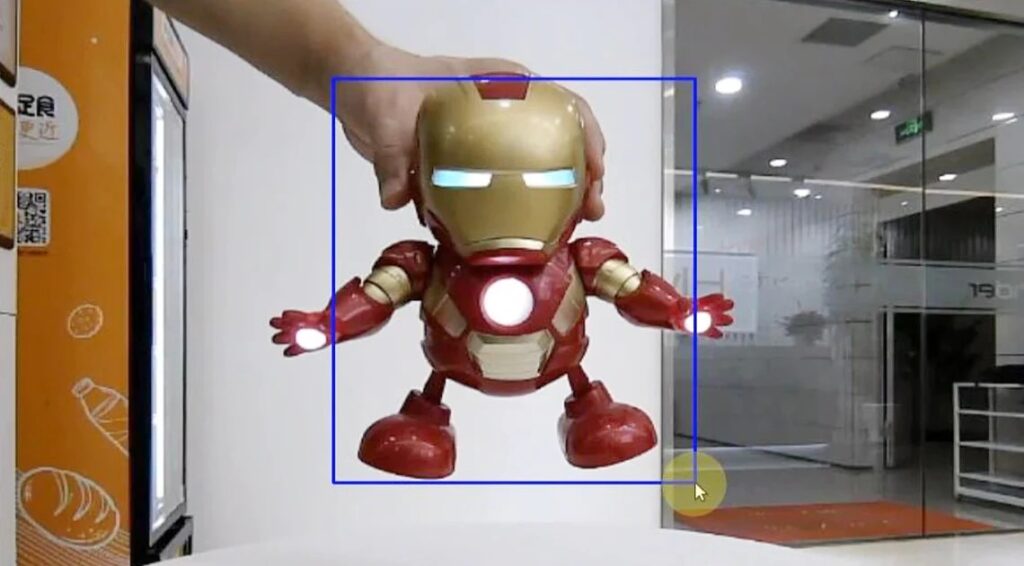
Realtà Aumentata (AR)
Dopo aver selezionato i modelli sull’APP, tali modelli selezi0nati possono essere sovrapposti su l’ AprilTag una volta riconosciuti.

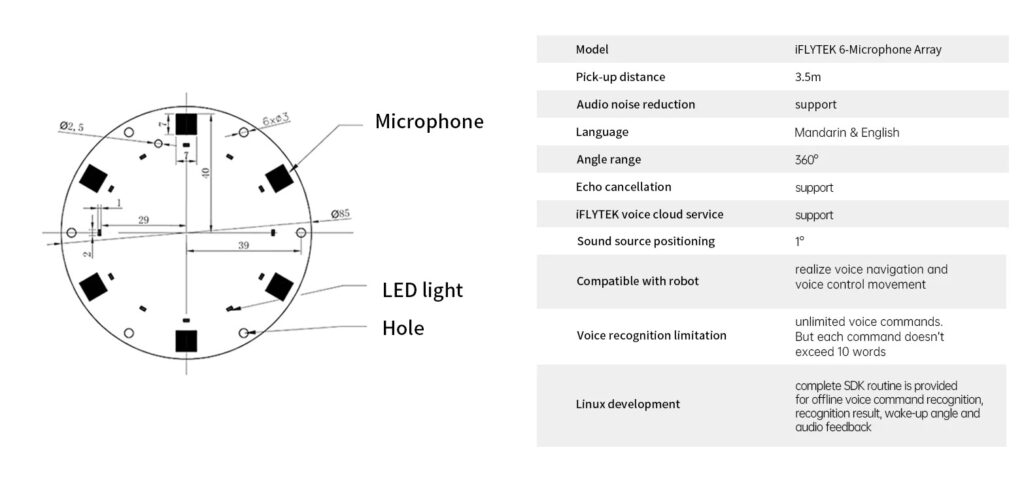
Microfono a campo lontano Vettore

Questo array di 6 microfoni è abile nella localizzazione della sorgente sonora in campo lontano, nel riconoscimento vocale e nell’interazione vocale. Rispetto al normale modulo microfono, può implementare funzioni più avanzate.


Interconnesso Corteo

Navigazione multi-veicolo
A seconda della comunicazione multi-macchina, JetTank può ottenere la navigazione multi-veicolo, la pianificazione del percorso e l’evitamento intelligente degli ostacoli.
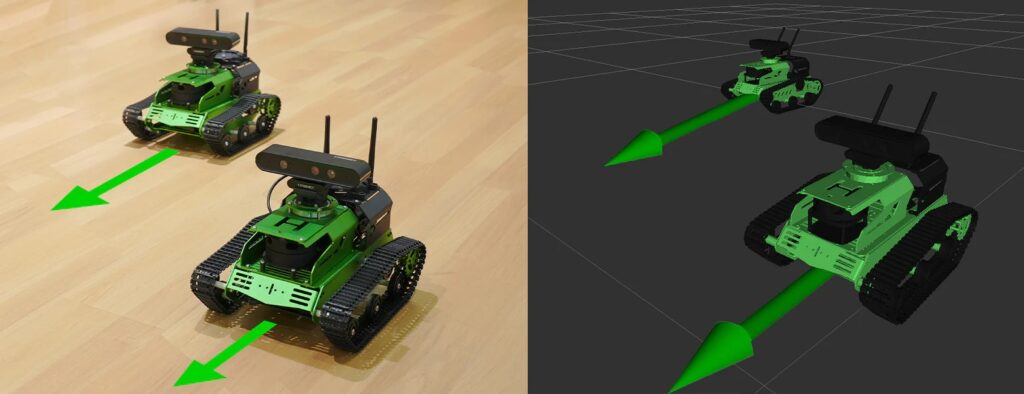
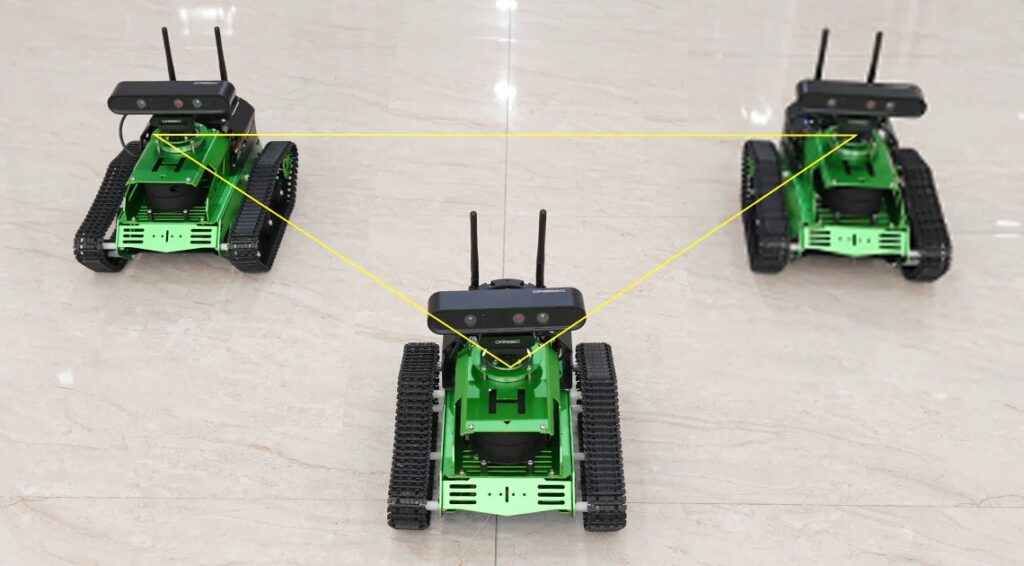
Un lotto di auto JetTank può mantenere la formazione, compresa la linea orizzontale, la linea verticale e il triangolo, durante il movimento.

Un gruppo di JetTank può essere controllato da un solo handle wireless per eseguire azioni in modo uniforme e simultaneo.
Sistema operativo del robot ROS
Simulazione di gazebo
JetTank utilizza il framework ROS e supporta la simulazione Gazebo. Gazebo offre un nuovo approccio per controllare JetTank e verificare l’algoritmo in un ambiente simulato, che riduce i requisiti sperimentali e migliora l’efficienza.

L'algoritmo cinematico può essere verificato in simulazione per accelerare l'iterazione dell'algoritmo e ridurre il costo dell'esperimento.
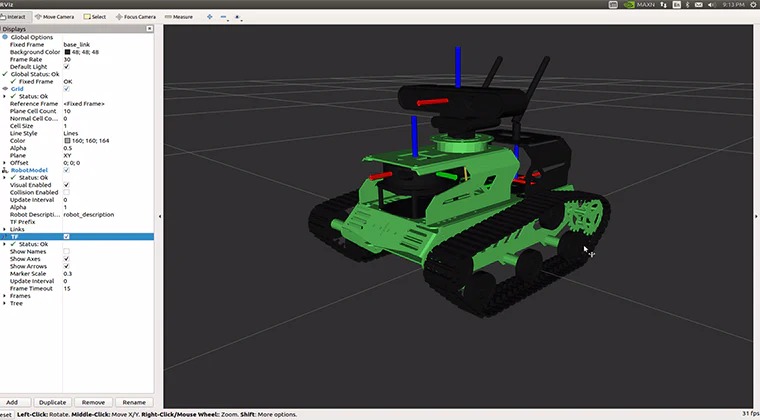
RViz può visualizzare il risultato della mappatura e della navigazione, che facilita il debug e migliora l'algoritmo.
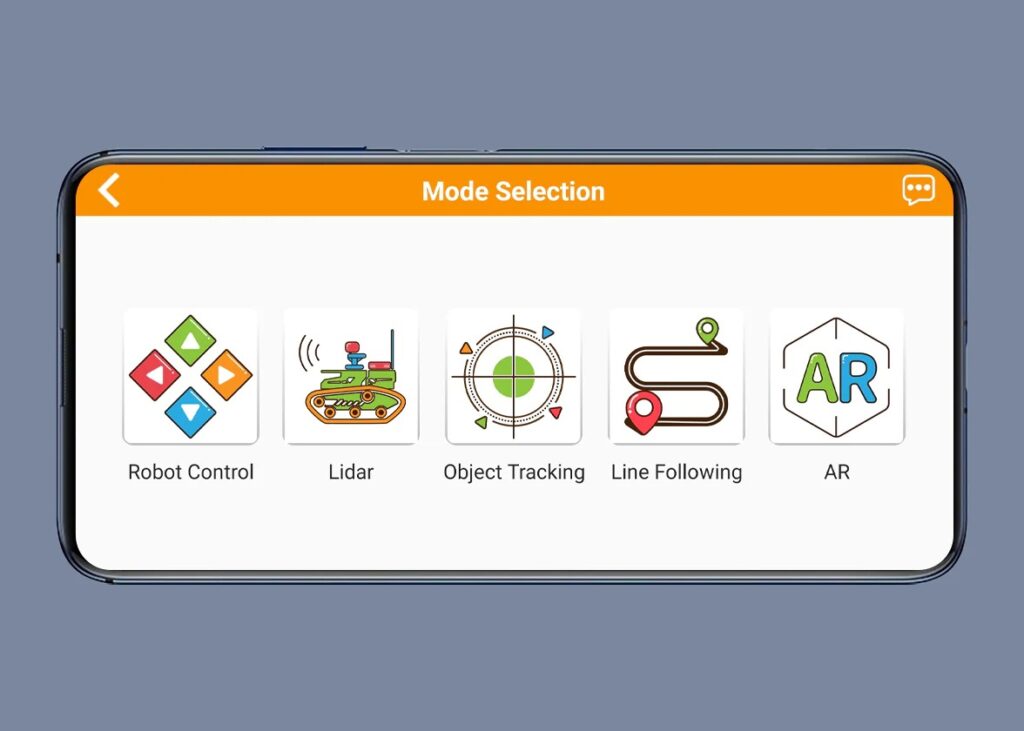
Vari metodi di controllo


Struttura del prodotto

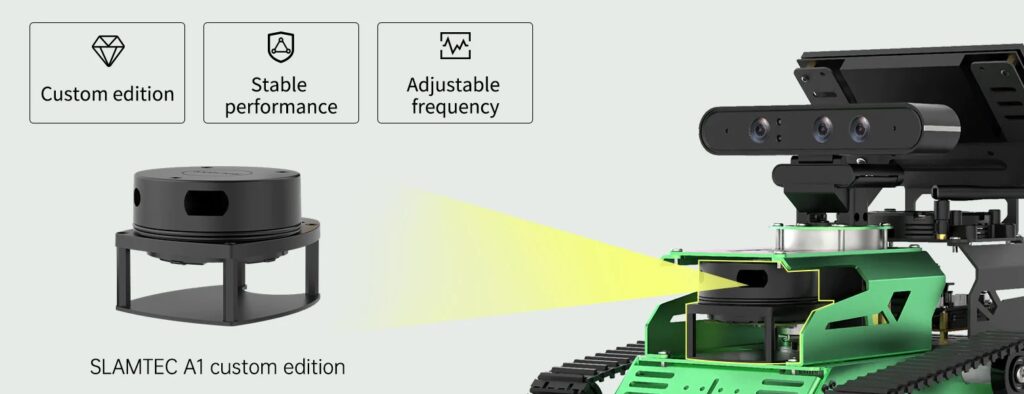
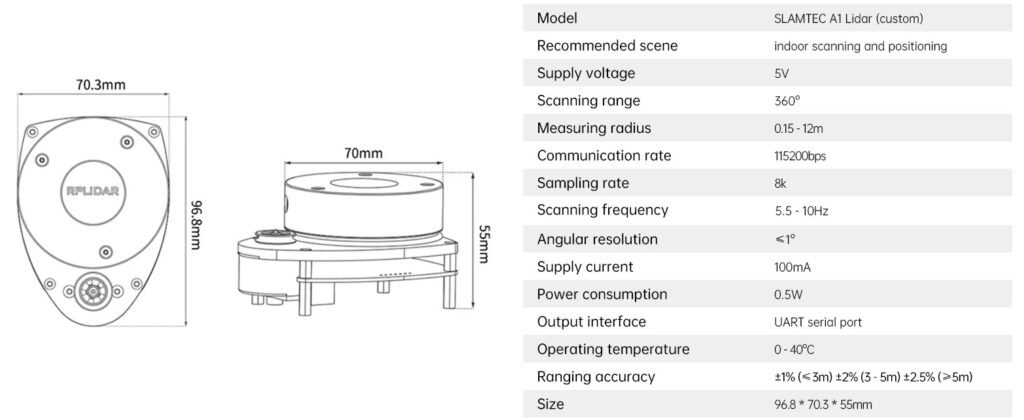
Lidar SLAMTEC A1
Fotocamera di profondità ORBBEC Astra Pro
iFLYTEK Far-field Microphone Array Module
Touchscreen LCD HD da 7 pollici
Inclinazione panoramica flessibile

Accessori principali
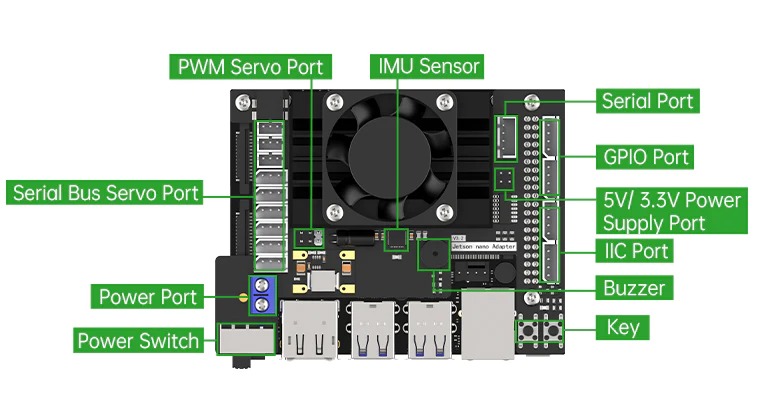
Scheda di espansione multifunzionale
La scheda di espansione ha un sensore IMU integrato per rilevare la postura del robot in tempo reale. Sono presenti PWM a 2 canali, 2 tasti, un LED, 1 cicalino, 1 interfaccia servo del bus seriale a 9 canali, 2 porte di espansione GPIO e 2 interfacce IIC.
Motoriduttore Hall Encoder
Il motore 520 è dotato di encoder ad alta precisione e presenta una forza elevata e prestazioni elevate. L’encoder Hall incrementale di fase AB integrato si distingue per l’elevata precisione e la capacità anti-interferenza.

Batteria Lipo da 11,1 V 6000 mAh
Questa batteria Lipo di grande capacità può alimentare meglio il robot e prolungare la vita lavorativa del robot.

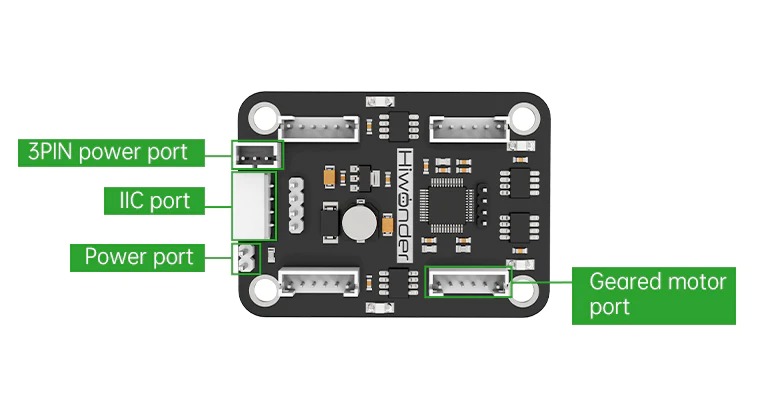
Driver del motore dell'encoder
JetTank è dotato di driver del motore dell’encoder a 4 canali che semplifica il controllo del motore.
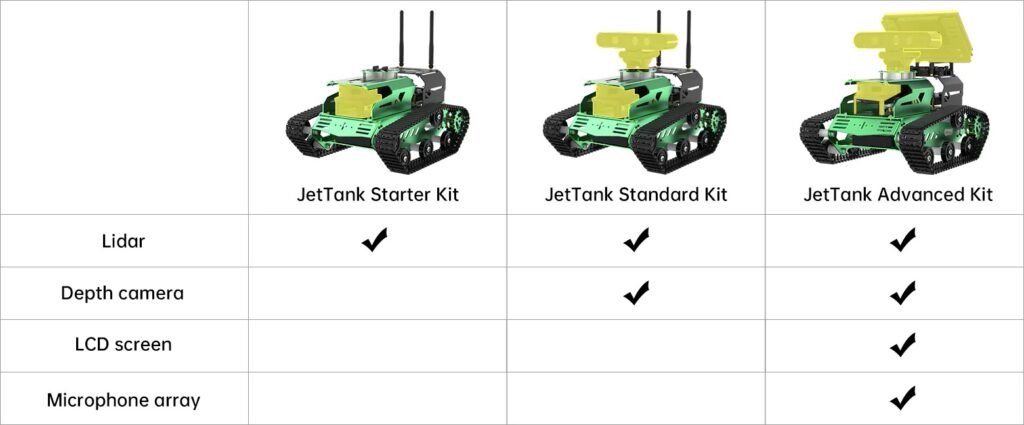
Differenza tra i kit di robot
Scarica le risorse e segui le video lezioni
Specifiche tecniche
| Dimensione del prodotto | 306(L) x 246(W) x 286(H) mm |
|---|---|
| Peso | 2.9kg |
| Materiale | Staffa in lega di alluminio dura interamente in metallo (anodizzata) |
| Batteria | Batteria Lipo da 11,1 V 6000 mAh |
| Vita lavorativa continua | 60min |
| Hardware | Controller ROS e scheda di espansione ROS |
| Sistema operativo | Ubuntu 18.04 LTS + ROS Melodic |
| Software | iOS / Android APP |
| Comunicazione | USB / WiFi / Ethernet |
| Linguaggio di programmazione | Python/C/C++/JavaScript |
| Conservazione | 32GB TF card |
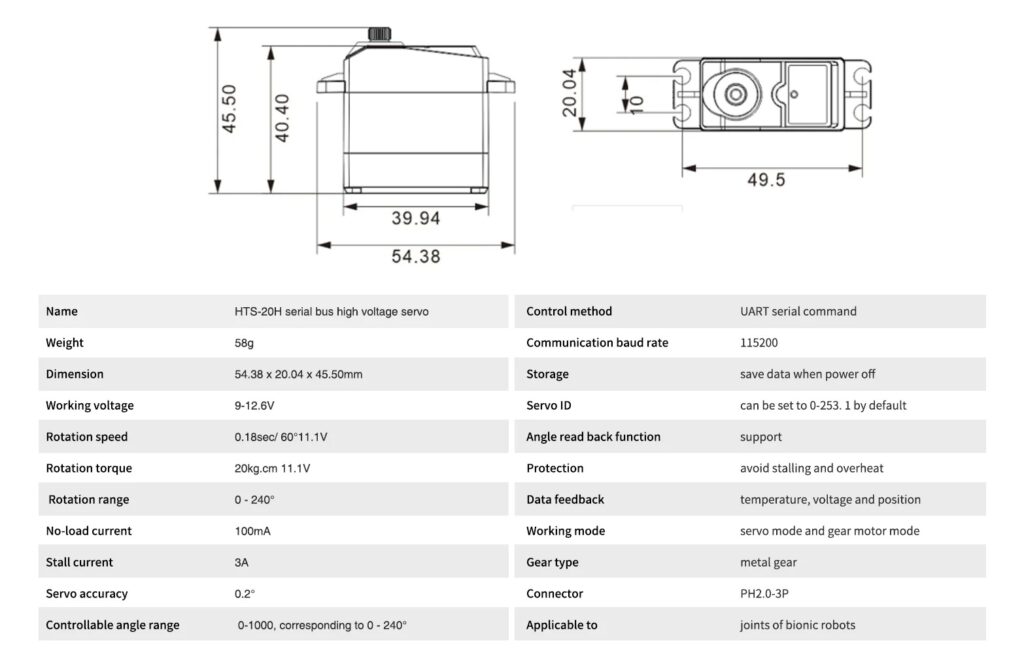
| Servo | HTS-20H serial bus servo |
| Metodo di controllo | Smartphone / joystick |
| Dimensioni della confezione (kit avanzato) | 335(L) x 320(W) x 225(H)mm |
| Peso della confezione (kit avanzato) | Circa 4 kg |
| Motoriduttore Hall Encoder | Tensione nominale: 12V |
| Batteria lipo | Tensione: 11,1 V |
| Starter kit | 1 x Jet Tank (include Lidar e scheda Jetson Nano, assemblato) |
| Standard kit | 1 x Jet Tank (include Lidar e scheda Jetson Nano, assemblato) |
| Advanced kit | 1 x Jet Tank (include Lidar e scheda Jetson Nano, assemblato) |