









xArm ESP32
Robot Hiwonder Hexapod con braccio robotico AI Vision alimentato da Raspberry Pi 4B 4GB
Descrizione prodotto
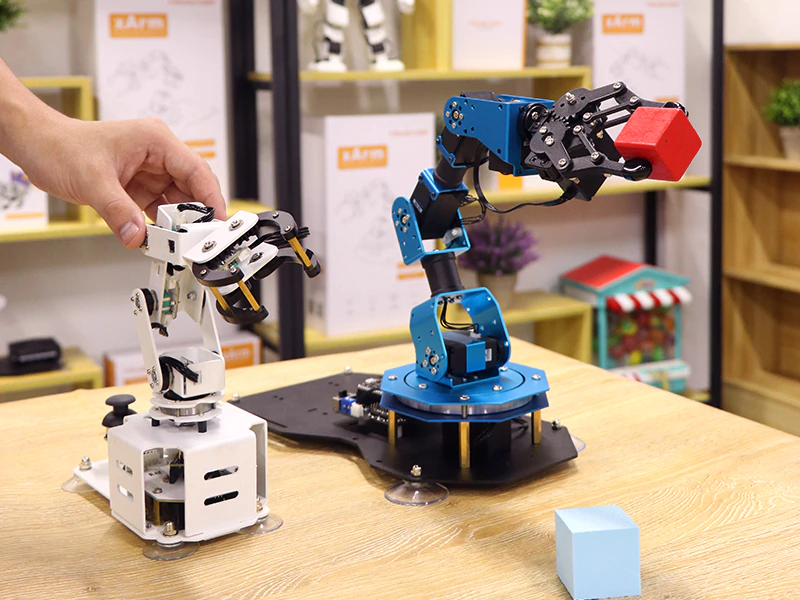
Il braccio robotico xArm-ESP32 con comunicazione wireless Wi-Fi e Bluetooth utilizza la programmazione Micro-Python e alimentato da ESP32.
Non solo ha varie funzioni operative tradizionali del braccio robotico desktop, ma mantiene anche le porte di espansione. Quindi puoi sviluppare più funzioni con il kit di espansione del sensore e l’editor Python.
- Alimentato da ESP32 open source
- Supporta la programmazione MicroPython e fornisce l'editor Python
- Con sensori Hiwonder per lo sviluppo secondario
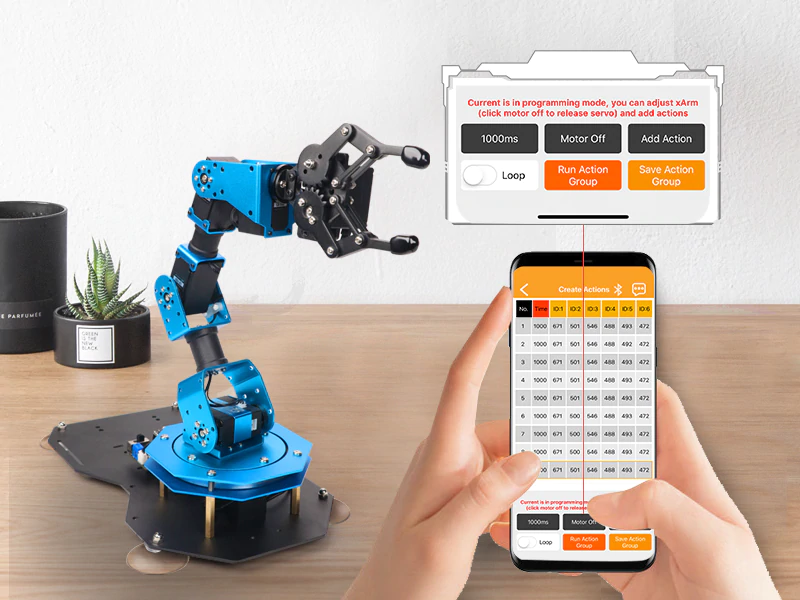
- Supporta più metodi di controllo
- Visual APP Operation Interface and Graphic PC software

Supporta più metodi di controllo


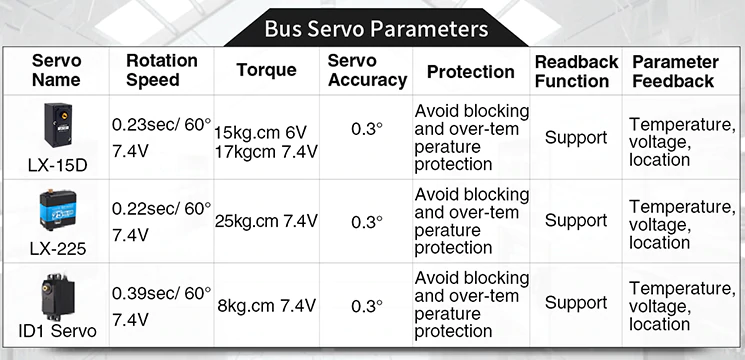
Funzione servo
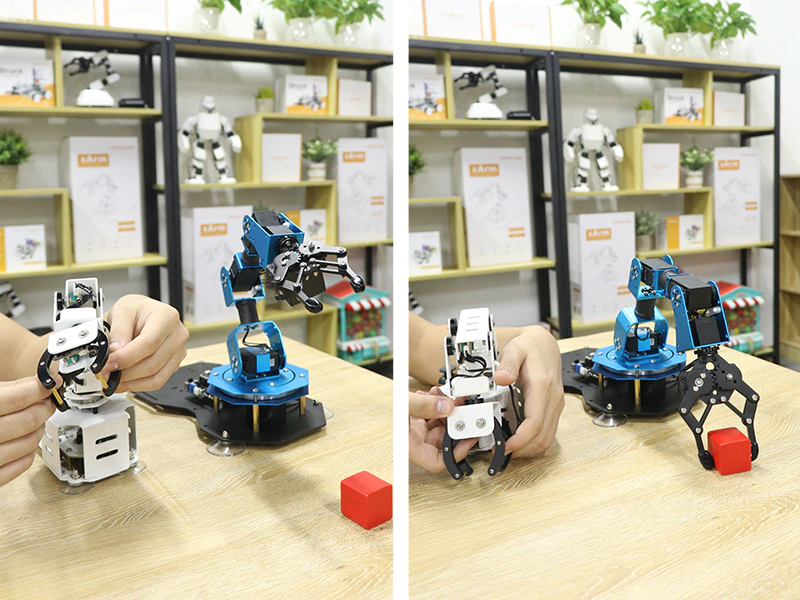
Il braccio robotico utilizza un servo bus seriale intelligente con alta precisione, funzione di feedback e cablaggio conveniente che riduce l’attrito tra filo e staffa. Il servo alla base viene aggiornato a un servo di coppia da 25 kg in modo che il braccio robotico possa afferrare più di 500 g e il movimento sia più stabile.
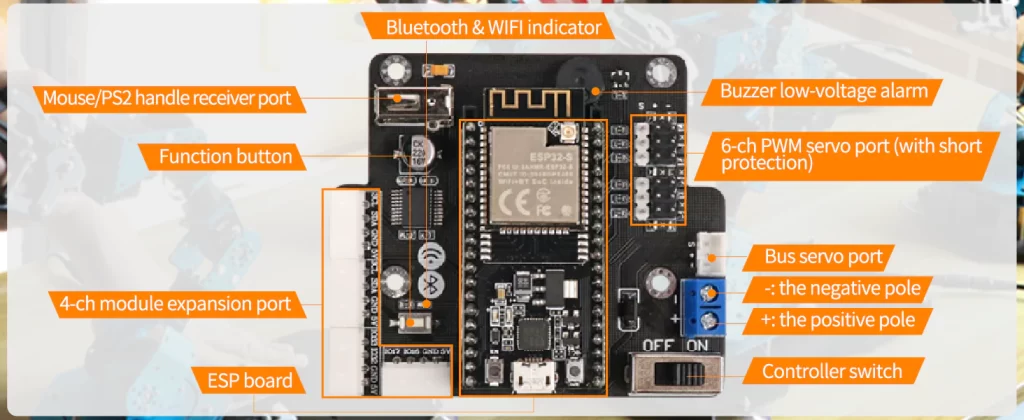
Sistema di controllo principale ESP32
Il controller open source ESP32 adotta un design modulare semplice, costituito da una scheda principale ESP32 e una scheda di espansione multifunzionale. Carica le servoporte integrate, il cicalino, il LED, l’interfaccia USB e molti altri componenti elettronici e ha anche diverse interfacce di espansione, in modo che l’utente possa collegare direttamente altri sensori e moduli di attuazione per lo sviluppo secondario. Con le funzioni Wi-Fi e Bluetooth, la scheda ESP è molto comoda per lo sviluppo di applicazioni di trasmissione dati wireless.
Scarica le risorse e segui le video lezioni
Specifiche tecniche
| Dimensioni | 277 x 155 x 426mm |
|---|---|
| Peso | circa 1kg |
| Materiale | corpo in lega |
| DOF | 5DOF+gripper |
| Alimentazione | Adattatore DC da 7,5V / 6A |
| Sistema di controllo | Scheda di controllo open source ESP32 |
| Software | PC software+iOs/Android APP |
| Servo | ID1/L X-15D/L .X-225 bus servo |
| Metodo di controllo | controller di sincronizzazione/APP/PS2 |
| Contenuto della confezione (non assemblato) | 1 x Staffe per braccio robotico (con servo clacson) |
| Contenuto della confezione (assemblato) | 1 x corpo xArm ESP32 |